Movimiento Circular Acelerado
El Movimiento Circular Uniforme (MCU) que analizamos hasta ahora; tiene una aceleración centrípeta \(\bf{a_T}\) que ocasiona el giro y cambia la dirección de la velocidad tangencial \(\bf{v_T}\) que lleva el móvil; pero de módulo constante; al igual que su velocidad angular \(\bf{\omega}\).
En un movimiento circular:
¿La velocidad tangencial o la velocidad angular del móvil siempre son constantes?
¡Claramente no! Y es lo que vamos a estudiar a continuación.
Movimiento Circular Acelerado
En un Movimiento Circular Acelerado (MCA); cambia la velocidad del móvil: varía la velocidad angular y varía la magnitud de la velocidad tangencial.
En este movimiento aparecen magnitudes nuevas a considerar como la aceleración tangencial \(\bf{a_T}\), aceleración total neta \(\bf{\vec{a_{TOT}}}\) y aceleración angular \(\bf{\alpha}\); otras se mantienen igual en su definición como la aceleración centrípeta \(\bf{a_C}\).
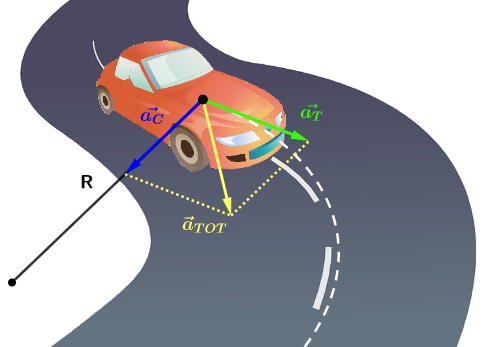
La aceleración total (o neta) que siente el móvil está compuesta por la aceleración centrípeta (que cambia la dirección de la velocidad tangencial) y la aceleración tangencial (que cambia el módulo de la velocidad tangencial).
Ejemplos de este tipo de movimiento:
- Un automóvil acelerando mientras recorre una curva en un camino.
- Una piedra atada a una soga y siendo movida en círculos, cada vez más rápido.
- Un avión haciendo un loop; dando una vuelta en forma de O vertical.
Aceleración Centrípeta
La aceleración centrípeta es el cambio de la velocidad tangencial, pero en dirección; su ecuación sigue siendo válida:
\(a_C=\frac{{v_T}^2}{R}=\omega^2.R\)
El valor de la aceleración centrípeta varía junto con la velocidad tangencial; y será máxima cuando la velocidad lo sea.
Aceleración Tangencial
La aceleración tangencial es el cambio de la velocidad tangencial, pero en módulo, en magnitud.
De manera similar a la aceleración lineal que conocemos, su definición:
\(a_T=\frac{\Delta v_T}{\Delta t}\).
Como es tangencial, su vector es tangente a la trayectoria del móvil en el movimiento circular; o sea que es paralela al vector velocidad tangencial \(v_T\).
- Si la velocidad tangencial aumenta; el vector aceleración tangencial tiene el mismo sentido.
- Si la velocidad tangencial disminuye; el vector aceleración tangencial tiene el sentido opuesto.
Aceleración Resultante
La aceleración resultante es la suma total de las aceleraciones que afectan al móvil en el movimiento circular. Entonces, esta aceleración resultante, total o neta; es la suma vectorial de la aceleración centrípeta y la aceleración tangencial:
\(\vec{a}_{TOT}=\vec{a_C}+\vec{a_T}\)
Su módulo está relacionado con los módulos de las otras aceleraciones:
\(|\vec{a}_{TOT}|^2=|\vec{a_C}|^2+|\vec{a_T}|^2\)
En esa ecuación, podemos reemplazar \(a_C\) por su igualdad; para reemplazar \(a_T\), necesitamos conocer otros datos relacionados con cinemática u obtenerla del movimiento mismo.
Aceleración Angular
En el MCA tenemos cambio del módulo de la velocidad tangencial… Entonces, al cambiar ella, cambia también la velocidad angular.
¿Y esto por qué?
Primero; porque si pensamos en la relación entre la velocidad angular y tangencial; si cambia una, cambia la otra:
\(v_T=\omega \cdot R\)
Segundo; porque si aumenta o disminuye la velocidad tangencial, claramente el móvil girará más rápido o más lento y eso cambia la velocidad angular.
La aceleración angular también se relaciona con la aceleración tangencial con una ecuación similar a la anterior:
\(a_T=\alpha \cdot R\)
Sabiendo que \(a_T=|\vec{a_T}|\) y que \(\alpha=|\vec{\alpha}|\), simplificado de la ecuación vectorial:
\(\vec{a_T}=\vec{\alpha}\times\vec{R}\)
Como su definición lo indica; la aceleración angular es el cambio de la velocidad angular en el tiempo:
\(\alpha=\frac{\Delta \omega}{\Delta t}=\frac{\omega_2 - \omega_1}{t_2 – t_1}\)
Si despejamos correctamente y tomamos \(t_1=0 s\); llegamos a la ecuación horaria:
\(\omega=\omega_i+\alpha.t\)
Con todas las relaciones que ya vimos, podemos encontrar la otra ecuación horaria:
\(\theta=\theta_i+\omega_i . t + \frac{1}{2}.\alpha.t^2\)
Y Bernoulli:
\(\omega^2={\omega_i}^2+2.\alpha.\Delta \theta\)
Estas últimas ecuaciones nos indican que el MCA es similar al MRUV; teniendo en cuenta que pasamos de un sistema (lineal) a otro (circular), simplemente multiplicando por R:
\(S=\theta \cdot R\)
\(v_T=\omega \cdot R\)
\(a_T=\alpha \cdot R\)
¡Ya podemos atacar varios problemas para aprender aún más!