Movimiento Armónico Amortiguado
¿Qué es el MAA?
Lo único que cambia con respecto al MAS es que ahora tiene fricción. Solo eso!!
MAA significa movimiento armónico amortiguado.
Así que el sistema no oscila para siempre, se detiene con el tiempo, porque la fuerza de fricción va tomando energía del sistema hasta hacerlo detener. En este caso, la energía no se conserva!
Ecuación del MAA
Ahora tenemos que añadir en la Segunda Ley de Newton la fuerza de fricción también.
Veamos el ejemplo del sistema masa-resorte.
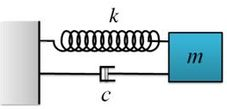
Tenga en cuenta que, en este caso, además del resorte con constante elástica \(k\),también tenemos un amortiguador, con constante de amortiguación \(c\).
Además del amortiguador, hay otros factores que pueden generar fricción en el sistema. Si el bloque estuviera sumergido en un fluido viscoso, por ejemplo, la fuerza de fricción sería la fuerza que el líquido ejerce en el bloque. Otro ejemplo: si fuera un resorte vertical, un disco pegado a la masa haría que la resistencia del aire ejerciera una fuerza de fricción también.
Pero en todos estos casos, la fuerza de fricción se calcula de la misma manera:
\(F_{a t}=-c v\)
Donde \(v\) es la velocidad
Así como la fuerza elástica es siempre contraria a la posición, la fuerza de amortiguación (fricción) también es:
Pero la fricción no era \(F_{a t}=\mu N\)?
Lo era, pero en este caso, estamos considerando fricciones viscosas, que siempre se calculan de esta manera. Esa fricción que aprendimos antes es la fricción seca.
Bien, entonces vamos a aislar el bloque y ver qué fuerzas están actuando en él:

Entonces la fuerza resultante es:
\(F_{R}=F_{e l}+F_{a t}\)
Donde \(F_{a t}=-c v\) y \(F_{e l}=-k x\)
Observación: también podríamos decir que \(F_{R}=-F_{e l}-F_{a t}\), pero entonces tendríamos que decir que \(F_{a t}=c v\) y \(F_{e l}=k x\).
Sustituyendo en la Segunda Ley de Newton:
\(F_{R}=m a\)
\(\Rightarrow-c v-k x=m a\)
Pero \(a=\ddot{x}\) y \(v=\dot{x}\)
Entonces:
\(-c \dot{x}-k x=m \ddot{x}\)
Luego:
\(m \ddot{x}+c \dot{x}+k x=0\)
Esa es la ecuación del MAA.
Observación: Los coeficientes son siempre positivos! Si hay alguno negativo, compruebe el signo de las fuerzas, como hicimos antes en el MAS.
¡Ves! ¿Te has dado cuenta de que hemos hecho los mismos pasos del MAS?
La única diferencia es que apareció un término más en la ecuación
Si hacemos \(c=0\) (rozamiento cero), tendremos la ecuación del MAS.
Y esta ecuación es una EDO de segundo orden homogénea
¿Y cómo la solucionamos?
Echemos un vistazo al cálculo! Cuando tenemos una EDO de segundo orden homogénea, resolvemos la ecuación auxiliar:
\(m r^{2}+c r+k=0\)
Dividiendo a cada término por \(m\):
\(r^{2}+\frac{c}{m} r+\frac{k}{m}=0\)
Ahora, llamando \(\frac{c}{m}=\gamma\) y \(\omega_{0}^{2}=\frac{k}{m}\), vamos a calcular el de esa ecuación
\(=b^{2}-4 a c=\gamma^{2}-4.1 \cdot \omega_{0}^{2}\)
Y entonces tenemos tres posibilidades:
\(\Delta>0 ; \Delta=0 ; \Delta<0\)
En cada caso, tenemos una solución diferente, ¿recuerdas?
Así que vamos a analizar cada una de estas posibilidades.
Pero antes vamos a darle un nombre a las posibles soluciones.
Cuando \(\Delta>0\): críticamente amortiguado (supercrítico);
\(\frac{\gamma}{2}>\omega_{0}\)
Cuando \(\Delta=0\): sobreamortiguado;
\(\frac{\gamma}{2}=\omega_{0}\)
Cuando \(\Delta<0\): subamortiguado;
\(\frac{\gamma}{2}<\omega_{0}\)
Sólo hay que recordar que “sub” significa “abajo” por (debajo de cero) y “super” significa “por encima” (por encima de cero).
¿De acuerdo?
Entonces, vamos allá!
Críticamente amortiguado (supercrítico)
En ese caso \(\Delta>0\):
Entonces la ecuación auxiliar tiene dos raíces reales y distintas:
\(m r^{2}+c r+k=0\)
\(r^{2}+\frac{c}{m} r+\frac{k}{m}=0\)
Llamando: \(\gamma=\frac{c}{m}\) y \(\omega_{0}^{2}=\frac{k}{m}\):
\(r=\left\{\begin{array}{l} {r_{1}=-\frac{\gamma}{2}-\sqrt{\frac{\gamma^{2}}{4}-\omega_{0}^{2}}} \\ {r_{2}=-\frac{\gamma}{2}+\sqrt{\frac{\gamma^{2}}{4}-\omega_{0}^{2}}} \end{array}\right.\)
Recordando que \(r>0\):
La solución viene dada por:
\(x(t)=c_{1} e^{r_{1} t}+c_{2} e^{r_{2} t}\)
Las constantes \(c_{1}\) y \(c_{2}\) son dadas por las condiciones iniciales de \(x(0)\) y \(\dot{x}(0)\).
El gráfico del amortiguamiento supercrítico tiene este aspecto:

Una suma de exponenciales decrecientes.
Sobreamortiguado
En ese caso: \(\Delta=0\)
Entonces la ecuación auxiliar tiene dos raíces reales e iguales:
\(r^{2}+\frac{c}{m} r+\frac{k}{m}=0\)
\(r=r_{1}=r_{2}=-\frac{c}{2 m}=-\frac{\gamma}{2}\)
Porque \(r=0\)
La solución viene dada por:
\(x(t)=c_{1} e^{r t}+c_{2} t e^{r t}\)
O, si prefieres resaltar:
\(x(t)=\left(c_{1}+c_{2} t\right) e^{r t}\)
Las constantes \(c_{1}\) y \(c_{2}\) también se dan por las condiciones iniciales de \(x(0)\) y \(\dot{x}(0)\).
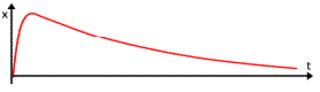
El gráfico del movimiento sobreamortiguado tiene más o menos el mismo aspecto del amortiguamiento supercrítico (recuerda que \(r<0\)):

Como puedes notar, la \(x\) decae más rápidamente en este caso que en el caso supercrítico, incluso el amortiguamiento siendo menor.
Subamortiguado
En ese caso: \(\Delta<0\)
Entonces la ecuación auxiliar tiene dos raíces imaginarias:
\(r^{2}+\frac{c}{m} r+\frac{k}{m}=0\)
Llamando \(\gamma=\frac{c}{m}\) y \(\omega_{0}^{2}=\frac{k}{m}\):
\(r^{2}+\gamma r+\omega_{0}^{2}=0\)
\(r=-\frac{\gamma}{2} \pm i \omega=\left\{\begin{aligned} r_{1} &=-\frac{c}{2 m}+\frac{i}{2 m} \sqrt{4 \omega_{0}^{2} m^{2}-c^{2}}=-\frac{\gamma}{2}-i \sqrt{\omega_{0}^{2}-\frac{\gamma^{2}}{4}} \\ r_{2} &=-\frac{c}{2 m}-\frac{i}{2 m} \sqrt{4 \omega_{0}^{2} m^{2}-c^{2}}=-\frac{\gamma}{2}+i \sqrt{\omega_{0}^{2}-\frac{\gamma^{2}}{4}} \end{aligned}\right.\)
Recordando que \(r<0\).
La solución viene dada por:
\(x(t)=e^{-\frac{\gamma t}{2}}\left[c_{1} \cos (\omega t)+c_{2} \operatorname{sen}(\omega t)\right]\)
Donde:
\(\omega=\frac{1}{2 m} \sqrt{4 \omega_{0}^{2} m^{2}-c^{2}}=\sqrt{\omega_{0}^{2}-\frac{\gamma^{2}}{4}}\)
Las constantes \(c_{1}\) y \(c_{2}\) son siempre dadas por las condiciones iniciales de \(x(0)\) y \(\dot{x}(0)\).
Dando una cambio a esas funciones trigonométricas, podemos reescribir esa solución en la forma
\(x(t)=A e^{-\frac{x t}{2}} \cos (\omega t+\phi)\)
Ahora, las constantes \(A\) y \(\phi\) son dadas por las condiciones iniciales de \(x(0)\) y \(\dot{x}(0)\)
El gráfico del movimiento subamortiguado tiene este aspecto:

En este caso, el movimiento es oscilatorio, pero las amplitudes van siendo cada vez más pequeñas, hasta detenerse.
No te preocupes por memorizar estas soluciones,si no lo recuerdas! En caso de ser necesario, tendrás un formulario con ellas. Lo más importante es saber calcular \(\Delta\) y clasificar la amortiguación en caso de ser subamortiguada, sobreamortiguada o críticamente amortiguada!
Recuerde que la amortiguación que hace que \(x\) tienda al origen más rápidamente es la crítica. Esto ya ha sido comprobado en algunas pruebas.
Consideraciones finales
Has entendido la idea, no?
En el fondo, estamos haciendo lo mismo que hicimos con MAS, sólo que considerando la fricción.
Una observación importante: hemos dicho que la fuerza de fricción siempre tiene la forma:
\(F_{a t}=-c \dot{x}\)
Luego, era solo sustituir con la Segunda Ley de Newton:
\(F_{R}=m a\)
Pero si es el caso de ser la Segunda Ley de Newton de rotación:
\(\tau_{R}=I \alpha\)
El torque de fricción viene dado por:
\(\tau_{a t}=-c \dot{\theta}\)
¿Entiende? Sería el equivalente de la rotación: el torque de fricción es proporcional a la velocidad angular.
Siempre será así a menos que el problema proporcione otra expresión, ¿de acuerdo?
Otra observación: hicimos un ejemplo de masa-resorte, pero podría ser un péndulo o cualquier otro sistema. Pero la idea es la misma. Es sólo seguir el paso a paso!
Resumen
Muchísima información para tu cabeza, ¿verdad? Vamos a repasar los puntos más importantes.
-
Ecuación del MAS
Luce así:
\(a \ddot{x}+b \dot{x}+c x=0\)
Donde \(a\), \(b\) y \(c\) son positivos!
Fuerza de amortiguación (fricción):
\(F_{a t}=-c \dot{x}\)
Donde \(c\) es la constante de amortiguación
-
Tipos de amortiguación
\(a \ddot{x}+b \dot{x}+c x=0\)
\(\Delta=b^{2}-4 a c\)
Críticamente amortiguado \(\Delta>0\)
Sobreamortiguado \(\Delta=0\)

Subamortiguado \(\Delta<0\)
