Matriz de rotación
Una matriz de rotación, como su nombre indica, es una matriz que rota un vector en el espacio en que está contenido. Vamos a limitar, sin embargo, al rotar un vector de ángulo \(\theta\) en \(\mathbb{R}^{2}\) o rotarlo en relación a un eje en \(\mathbb{R}^{3}\).
Rotación en \(\mathbb{R}^{2}\)
Entonces, tenemos una transformación \(R: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}\), tal que \(R(v)=u\). Donde \(u\) es el vector \(v\) rotando \(\theta\) grados.
Para hallar la matriz que hace esto, primero debemos hallar cuál es la ecuación de \(R\). Para ello debemos saber \(R(1,0)\) y \(R(0,1)\). Vamos a comenzar visualizando lo que ocurre cuando rotamos estos vectores:
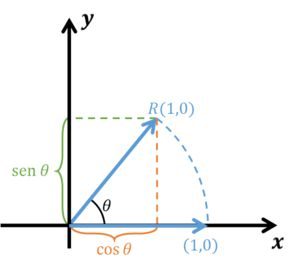
Con estos gráficos resulta más sencillo. Tenemos que:
\[R(1,0)=(\cos (\theta), \operatorname{sen}(\theta))\]
\[R(0,1)=(-\operatorname{sen}(\theta), \cos (\theta))\]
Entonces:
\[R=\left[\begin{array}{cc}\cos (\theta) & -\operatorname{sen}(\theta) \\ \operatorname{sen}(\theta) & \cos (\theta)\end{array}\right]\]
Nota: recordando que esa es la matriz que representa la rotación en sentido trigonométrico (antihorario). La matriz de rotación en sentido horario sería así:
\[R^{\prime}=\left[\begin{array}{cc}\cos (\theta) & \operatorname{sen}(\theta) \\ -\operatorname{sen}(\theta) & \cos (\theta)\end{array}\right]\]
Rotación en \(\mathbb{R}^{3}\)
En este caso tenemos que especificar el eje de rotación. Entonces, como debes haber imaginado, tendremos \(6\) matrices posibles, ya que tenemos \(2\) sentidos posibles en relación a los \(3\) ejes. Veamos un ejemplo:
Tenemos \(R_{y}: \mathbb{R}^{3} \rightarrow \mathbb{R}^{3}\), tal que \(R_{y}(v)=u\). Donde \(u\) es el vector \(v\) rotando \(\theta\) grados en relación al eje \(y\).
Para hallar la matriz que representa \(R_{y}\) debemos hallar cuánto vale \(R_{y}(1,0,0)\), \(R_{y}(0,1,0)\) y \(R_{y}(0,0,1)\). Como la rotación es en relación de \(y\), los vectores que están en el eje \(y\) permanecen inalterados:
\[R_{y}(0,1,0)=(0,1,0)\]
Mientras que para los vectores \((1,0,0)\) y \((0,0,1)\), tendremos:

Entonces:
\[R(1,0,0)=(\cos (\theta), 0,-\operatorname{sen}(\theta))\]
\[R(0,0,1)=(\operatorname{sen}(\theta), 0, \cos (\theta))\]
Por tanto:
\[R_{y}=\left[\begin{array}{ccc}\cos (\theta) & 0 & \operatorname{sen}(\theta) \\ 0 & 1 & 0 \\ -\operatorname{sen}(\theta) & 0 & \cos (\theta)\end{array}\right]\]
Si quisiéramos rotar hacia el otro lado:
\[R_{y}^{\prime}=\left[\begin{array}{ccc}\cos (\theta) & 0 & -\operatorname{sen}(\theta) \\ 0 & 1 & 0 \\ \operatorname{sen}(\theta) & 0 & \cos (\theta)\end{array}\right]\]
Análogamente, podemos hallar la matriz de rotación en relación del eje \(x\):
\[R_{x}=\left[\begin{array}{ccc}1 & 0 & 0 \\ 0 & \cos (\theta) & -\operatorname{sen}(\theta) \\ 0 & \operatorname{sen}(\theta) & \cos (\theta)\end{array}\right] ; R_{x}^{\prime}=\left[\begin{array}{ccc}1 & 0 & 0 \\ 0 & \cos (\theta) & \operatorname{sen}(\theta) \\ 0 & -\operatorname{sen}(\theta) & \cos (\theta)\end{array}\right]\]
Y en relación al eje \(z\):
\[R_{z}=\left[\begin{array}{ccc}\cos (\theta) & -\operatorname{sen}(\theta) & 0 \\ \operatorname{sen}(\theta) & \cos (\theta) & 0 \\ 0 & 0 & 1\end{array}\right] ; R_{z}^{\prime}=\left[\begin{array}{ccc}\cos (\theta) & \operatorname{sen}(\theta) & 0 \\ -\operatorname{sen}(\theta) & \cos (\theta) & 0 \\ 0 & 0 & 1\end{array}\right]\]
Por supuesto que no aprenderemos todas esas matrices. Si miramos con atención podremos notar un patrón en las rotaciones de \(\mathbb{R}^{3}\). Además de que son construidas usando la matriz de rotación de \(\mathbb{R}^{2}\). Entonces, aprendiendonos la de \(\mathbb{R}^{2}\), prácticamente tenemos las de \(\mathbb{R}^{3}\).
Rotación fuera del origen
Hasta ahora hemos visto cómo rotar vectores en relación a los ejes coordenados. ¿Y si quisiéramos rotarlo en relación a un eje desplazado? Veamos un ejemplo:
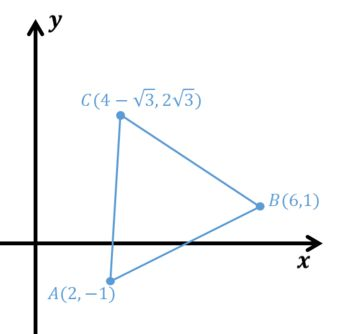
Los puntos \(A(2,-1), B(6,1)\) y \(C(x, y)\) son vértices de un triángulo equilátero. Determinar el vértice \(C\), usando la matriz de rotación.
Sabemos que un triángulo equilátero posee \(3\) lados iguales y \(3\) ángulos de \(60^{\circ}\). Entonces, tenemos dos opciones para continuar el problema:

Para rotar \(B\) en relación a \(A\) en sentido horario o sentido antihorario. Vamos a usar el sentido trigonométrico y rotar el vector en sentido antihorario.
Entonces tenemos un problema, porque no podemos hacerlo de esa forma. Bien, tenemos que:
\[[\overrightarrow{A C}]=\left[T_{60^{\circ}}\right][\overrightarrow{A B}]\]
Y sabemos que:
\[[\overrightarrow{A C}]=C-A=(x-2, y+1)\]
\[[\overrightarrow{A B}]=B-A=(4,2)\]
\[\left[T_{60^{\circ}}\right]=\left[\begin{array}{cc}\cos \left(60^{\circ}\right) & -\operatorname{sen}\left(60^{\circ}\right) \\ \operatorname{sen}\left(60^{\circ}\right) & \cos \left(60^{\circ}\right)\end{array}\right]\]
Vamos a resolver el sistema:
\[\left[\begin{array}{l}x-2 \\ y+1\end{array}\right]=\left[\begin{array}{cc}\frac{1}{2} & -\frac{\sqrt{3}}{2} \\ \frac{\sqrt{3}}{2} & \frac{1}{2}\end{array}\right]\left[\begin{array}{l}4 \\ 2\end{array}\right]\]
A partir de esa igualdad, llegamos al sistema:
\[\left\{\begin{array}{l}x-2=2-\sqrt{3} \\ y+1=2 \sqrt{3}+1\end{array}\right.\]
Entonces:
\[x=4-\sqrt{3}\]
\[y=2 \sqrt{3}\]
Entonces, el punto es \(C(4-\sqrt{3}, 2 \sqrt{3})\):