Transformaciones Lineales Geométricas Compuestas
¿Recuerdas que las \(TL\) compuestas pueden ser representadas mediante un producto de matrices? Esto nos será muy útil durante este tema.
Ya vimos todo lo relacionado con las transformaciones trigonométricas; sabemos reflejar, proyectar, rotar, y hacer un montón de cosas más con vectores.
Lo que no vimos fue qué hacer cuando queremos realizar varias transformaciones lineales.
Como debes estar imaginando, basta con multiplicar las matrices de cada transformación geométrica.
Podemos tener una super \(TL\), y es lo que veremos a continuación.
Entonces, vamos a construir una matriz que refleja un vector por el plano \(x=y\), lo rota \(90^{\circ}\) en sentido trigonométrico alrededor del eje \(z\) y dividida el tamaño del vector por \(2\), en ese orden.
Importante: como vamos a realizar un producto de matrices, el orden es sumamente importante. Como ya sabemos, cuando se trata de matrices, el orden del producto importa.
Vamos a hallar las matrices, considerando que estamos en \(\mathbb{R}^{3}\).
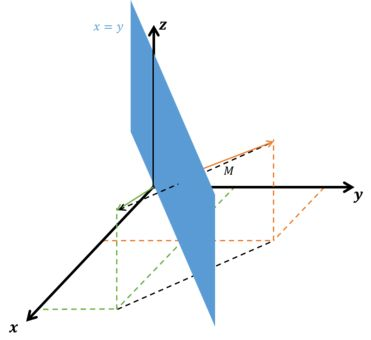
Primero, la matriz \(M\) que refleja los vectores por el plano \(x=y\):
Esta cambia las coordenadas \(x\) y \(y\), y mantiene inalteradas las coordenadas \(z\). Mira el gráfico:

Aplicando la transformación en la base canónica de \(\mathbb{R}^{3}\):
\[M(1,0,0)=(0,1,0)\]
\[M(0,1,0)=(1,0,0)\]
\[M(0,0,1)=(0,0,1)\]
Tenemos:
\[M=\left[\begin{array}{lll}0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1\end{array}\right]\]
Vamos a hallar la matriz \(R\) que rota el vector de \(90^{\circ}\) en relación al eje \(z\).
La rotación de \(\theta\) en relación al eje \(z\) es dada por:
\[\left[\begin{array}{ccc}\cos (\theta) & -\operatorname{sen}(\theta) & 0 \\ \operatorname{sen}(\theta) & \cos (\theta) & 0 \\ 0 & 0 & 1\end{array}\right]\]
Tenemos:
\[R=\left[\begin{array}{ccc}\cos \left(90^{\circ}\right) & -\operatorname{sen}\left(90^{\circ}\right) & 0 \\ \operatorname{sen}\left(90^{\circ}\right) & \cos \left(90^{\circ}\right) & 0 \\ 0 & 0 & 1\end{array}\right]\]
Y, finalmente, calculamos la matriz \(D\) que divide el vector por \(2\):
\]D(1,0,0)=\left(\frac{1}{2}, 0,0\right)\]
\[D(0,1,0)=\left(0, \frac{1}{2}, 0\right)\]
\[D(0,0,1)=\left(0,0, \frac{1}{2}\right)\]
\[D=\left[\begin{array}{ccc}\frac{1}{2} & 0 & 0 \\ 0 & \frac{1}{2} & 0 \\ 0 & 0 & \frac{1}{2}\end{array}\right]\]
Finalmente, vamos a hacer el producto. Es importante prestar atención al orden de las matrices. La que vamos a aplicar primero siempre está más a la derecha en el producto (más cerca del vector). Si aplicaramos esas matrices en un vector \(v\) tendríamos:
\[D \times R \times M \times v\]
La matriz \(S\) que queremos es dada por:
\[S=\left[\begin{array}{ccc}\frac{1}{2} & 0 & 0 \\ 0 & \frac{1}{2} & 0 \\ 0 & 0 & \frac{1}{2}\end{array}\right] \times\left[\begin{array}{ccc}0 & -1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1\end{array}\right] \times\left[\begin{array}{lll}0 & 1 & 0 \\ 1 & 0 & 0 \\ 0 & 0 & 1\end{array}\right]=\left[\begin{array}{ccc}-\frac{1}{2} & 0 & 0 \\ 0 & \frac{1}{2} & 0 \\ 0 & 0 & \frac{1}{2}\end{array}\right]\]
¡Eso es todo! Vamos a aplicar, por ejemplo, el vector \((2,3,-3)\) en ella. ¿Qué queremos que salga?
Reflejandolo por el plano \(x=y\), obtenemos el vector \((3,2,-3)\).
Rotandolo \(90^{\circ}\) en sentido trigonométrico en relación al eje \(z\), obtenemos el vector \((-2,3,-3)\).
Ten en cuenta que las últimas dos transformaciones no alteran las coordenadas \(z\).
Finalmente, dividimos por \(2\) y llegamos a \(\left(-1, \frac{3}{2},-\frac{3}{2}\right)\).
Vamos a aplicar el vector en la matriz:
\[\left[\begin{array}{ccc}-\frac{1}{2} & 0 & 0 \\ 0 & \frac{1}{2} & 0 \\ 0 & 0 & \frac{1}{2}\end{array}\right] \times\left[\begin{array}{c}2 \\ 3 \\ -3\end{array}\right]=\left[\begin{array}{c}-1 \\ \frac{3}{2} \\ -\frac{3}{2}\end{array}\right]\]
¡Eso es todo amigos! Vamos a los ejercicios.
Ir al Siguiente Capitulo: Producto Interno