Introducción a la Recta
¿Qué es una recta?
Lo primero que se nos viene a la cabeza cuando hablan de una recta es algo sin curvas, continuo, ¿verdad? Como una carretera:

Imagina una carretera infinita en el plano (en 2D) o en el espacio (3D). “¿Cómo así?”
Cuando tenemos un segmento recto e infinito, decimos que es una recta, por tanto, una recta no es más que un vector infinito. “¡¿Qué?!” Esta tiene dirección, pero su tamaño es infinito y no posee un sentido determinado como un vector, es decir:

Una recta posee infinitos puntos y tiene una dirección. Los puntos \(A\) y \(P\) representan los dos puntos que pertenecen a la recta \(r\) y el vector \(\vec{v}\) indica su dirección.
Rectas
Si tenemos una expresión en tres dimensiones (o sea, con tres coordenadas):
\[r:(x, y, z)=(1,2,4)+\lambda .(2,1,3)\]
Siendo \(\lambda\) cualquier número entero.
Vamos a intentar poner esa expresión geométrica en un gráfico para \(3\) valores diferentes de \(\lambda\), de acuerdo con la siguiente tabla (solo sustituimos el valor de \(\lambda\), multiplicar por \((2,1,3)\) y sumar):
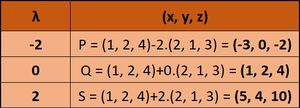
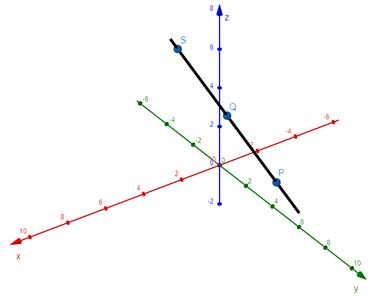
Poniendo los puntos \(P, Q\) y \(S\) en el espacio, tenemos esto:

Vamos a unir los tres puntos que encontramos, para obtener el segmento negro:
“¿Pero qué es eso?”
Ese segmento es la recta \(r\), de la ecuación \(r\): \(X(x, y, z)=(1,2,4)+\lambda .(2,1,3)\).
Deja que te explique, existen INFINITOS \(\lambda\), cada uno nos dará un punto del espacio, y uniendo todos los puntos obtendremos un segmento llamado recta, que también será infinita; en la gráfica solo tenemos una parte.
El vector que determina la dirección de esa recta puede ser \(\overrightarrow{P Q}, \overrightarrow{Q S}, \overrightarrow{P S}\), pues cualquier vector que conecte los dos puntos de esa recta sirve. Después de todo, estos son paralelos así que nos darán la misma dirección para la recta.
Ecuación vectorial de una recta
La ecuación que vimos en el ejemplo \((r:(x, y, z)=X=(1,2,4)+\lambda .(2,1,3))\) es llamada ecuación vectorial de una recta.
Para entender mejor, volvamos a la imagen del comienzo:

Para que una recta quede bien definida, el vector \(\overrightarrow{A P}=P-A\) debe ser colineal al vector \(\vec{v}\). Para que sean colineales deben ser múltiplos, entonces:
\[\overrightarrow{A P}=t \vec{v}\]
\[P-A=t \vec{v}\]
\[P=A+t \space \vec{v}\]
Bien, con la expresión anterior podemos determinar de cuál recta estamos hablando. Siendo \(P\) un punto genérico \((x, y, z)\), \(A\) un punto conocido de la recta y \(\vec{v}\) el vector director.
En la recta \(r\) podemos tener certeza que esta pasa por el punto \(A=(1,2,4)\) (esto ocurre cuando \(\lambda=0\)) y su vector director es \((2,1,3)\) (o cualquiera de sus múltiplos).
RECORDANDO QUE: usamos \(\lambda\) como parámetro en la ecuación, pero podemos usar \(t\), \(s\), cualquier letra (exceptuando \(x\), \(y\) y \(z\) para no confundirnos con las coordenadas).
El formato general de la ecuación vectorial es:
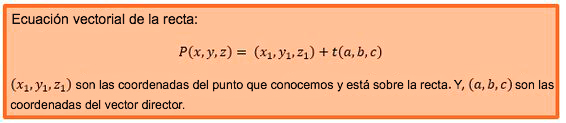
En pocas palabras, siempre usaremos \(\left(x_{1}, y_{1}, z_{1}\right)\) como las coordenadas de un punto conocido y \((a, b, c)\) como las coordenadas del vector director.
“¿Solo es posible representar una recta de esa forma?” Pues no, también existe la forma paramétrica, simétrica y reducida. ¡Vamos a hablar sobre cada una de ellas!
Ecuación paramétrica de la recta
La forma paramétrica es una manera distinta de escribir la ecuación vectorial. Si escribimos coordenada a coordenada la expresión vectorial de la recta:
\[X(x, y, z)=(1,2,4)+\lambda(2,1,3)\]
Tendremos las siguientes ecuaciones:
\[\left\{\begin{array}{l}x=1+2 \lambda \\ y=2+1 \lambda \\ z=4+3 \lambda\end{array}\right.\]
Entonces, esas son las ecuaciones paramétricas de la recta. Escribiendolas de una forma genérica, tenemos:

Ecuación simétrica de la recta
Las ecuaciones simétricas de la recta provienen de la paramétrica. “¿Cómo?” Si despejamos el parámetro \(\lambda\) en las ecuaciones de la recta, tendremos lo siguiente:
\[\left\{\begin{array}{l}\lambda=\frac{x-1}{2} \\ \lambda=\frac{y-2}{1} \\ \lambda=\frac{z-4}{3}\end{array}\right.\]
Y si igualamos todas las ecuaciones, tendremos:
\[\frac{x-1}{2}=\frac{y-2}{1}=\frac{z-4}{3}\]
Y de esta forma hallamos las ecuaciones simétricas de la recta. Escribiendolas de forma general, tenemos:

Cabe resaltar que las ecuaciones simétricas son un división, sólo existirán si \(\boldsymbol{a}, \boldsymbol{b}, \boldsymbol{c} \neq 0\), porque no tiene sentido dividir entre cero.
Ecuación reducida de la recta
Tal vez estés pensando: la reducida debe desarrollarse a partir de las ecuaciones simétricas. Dejame decirte que estás en lo correcto.
La ecuación reducida consiste en escribir dos de las coordenadas en función de la tercera. “¿Cómo así?” Es decir, escribir \(y\) y \(z\) en función de \(x\). “¿Cómo lo haríamos usando las simétricas?” Bien, mediante las simétricas, podemos escribir:
\[\frac{x-x_{1}}{a}=\frac{y-y_{1}}{b} \quad \text {y} \quad \frac{x-x_{1}}{a}=\frac{z-z_{1}}{c}\]
Despejando \(y\) en la primera y \(z\) en la segunda, tenemos:
\[y=\frac{b}{a}\left(x-x_{1}\right)+y_{1}\]
\[z=\frac{c}{a}\left(x-x_{1}\right)+z_{1}\]
Para la recta, tendríamos:
\[y=\frac{1}{2}(x-1)+2\]
\[z=\frac{3}{2}(x-1)+4\]
Importante: en cualquiera de las 4 ecuaciones de la recta las variables \(\boldsymbol{x}, \boldsymbol{y},\) y \(\boldsymbol{z}\) representan las coordenadas de un punto general perteneciente a la recta.
¡Y eso es todo amigos, vamos a practicar resolviendo algunos ejercicios!
